Giải Pháp Đồng Bộ Hóa Thời Gian - Vecow

Sứ mệnh quan trọng của Sự kết hợp cảm biến – Công nghệ đồng bộ hóa thời gian
Xe tự hành và robot đã trở thành xu hướng ngày càng tăng trong các ngành công nghiệp khác nhau, bao gồm xây dựng, nông nghiệp, khai thác mỏ và robot máy móc hạng nặng. Những máy này được thiết kế để hoạt động độc lập mà không cần sự can thiệp của con người, điều này có thể giúp tăng hiệu quả, giảm chi phí lao động và cải thiện độ an toàn. Công nghệ đồng bộ hóa thời gian có thể giúp cải thiện việc đồng bộ hóa cảm biến bằng cách cung cấp thông tin chính xác và chi tiết hơn về môi trường. Theo báo cáo của MarketsandMarkets, thị trường robot ngoài trời được dự đoán sẽ tăng trưởng với tốc độ CAGR là 27,4% trong giai đoạn dự báo từ năm 2021 đến năm 2026, do nhu cầu tự động hóa ngày càng tăng, những tiến bộ trong công nghệ cảm biến và việc áp dụng UAV ngày càng tăng.
Chúng tôi hiểu những thách thức liên quan đến đồng bộ hóa đa cảm biến và tập trung vào năm lĩnh vực chính để giải quyết những thách thức này: Lập bản đồ, Kết hợp cảm biến, Bản địa hóa, Điều hướng và Hiệu chuẩn thực sự là những lĩnh vực quan trọng để đảm bảo hoạt động chính xác và đáng tin cậy của phương tiện tự hành và robot. Sử dụng kết hợp cảm biến LiDAR 3D, máy ảnh, IMU, GNSS và Radar để tạo đám mây điểm 3D của môi trường là một cách tiếp cận phổ biến trong ngành. Việc kết hợp dữ liệu từ các cảm biến này thành một mô hình môi trường toàn diện, duy nhất thông qua các thuật toán tổng hợp cảm biến cũng rất quan trọng đối với các nhiệm vụ như lập bản đồ, định vị, phát hiện chướng ngại vật, lập kế hoạch đường đi, v.v. Việc hiệu chuẩn cũng quan trọng không kém để đảm bảo rằng dữ liệu từ mỗi cảm biến được đồng bộ hóa và căn chỉnh chính xác, giúp các hệ thống tự động vận hành chính xác và đáng tin cậy.
Giải pháp này cung cấp ba công nghệ chính để đồng bộ hóa thời gian: Cuộn dây thời gian, Đóng dấu thời gian và Lưu giữ thời gian. Những công nghệ này sẽ cải thiện khả năng đồng bộ hóa, nhận thức, độ chính xác và định vị đa cảm biến. Giải pháp này cũng cung cấp đầu ra Thời gian trong ngày (ToD) và Xung mỗi giây (PPS) đa kênh cho nhiều cảm biến bên ngoài, một cổng PTP/gPTP Gigabit Ethernet và một cổng Gigabit Ethernet cho đầu ra pub/sub ROS 2/DDS . Nó bao gồm một ăng-ten GNSS kép cho hướng robot và tích hợp IMU 9 trục có độ chính xác cao Xsens MTi-670. Các tính năng của phần mềm bao gồm chức năng chuỗi nối tiếp cho phép mở rộng các kênh đồng bộ hóa cho các nút cảm biến và bộ điều khiển. Giải pháp này đã tích hợp ăng-ten GNSS kép và thuật toán tổng hợp yaw IMU và cung cấp đầu ra thông tin đáng tin cậy thông qua cổng Ethernet. Chúng tôi cũng cung cấp công cụ Python thân thiện với người dùng để dễ dàng cấu hình các giao thức và tần số đồng bộ hóa dựa trên yêu cầu của cảm biến. Nền tảng này dựa trên Zynq UltraScale+ MPSoC của Xilinx, được biết đến với độ chính xác và độ tin cậy cao trong việc đồng bộ hóa dữ liệu nhạy cảm với thời gian trên các mạng công nghiệp.
Các tính năng chính

Cuộn dây thời gian
-
Căn chỉnh GNSS với đồng hồ bên trong cảm biến
-
Kích hoạt PPS liên tục tới tất cả các nút
-
Đảm bảo tất cả các cảm biến đều có cùng đường cơ sở

Dập thời gian
-
Đẩy giao thức thời gian tới tất cả các nút
-
Đảm bảo tất cả các cảm biến được đồng bộ hóa
-
Hỗ trợ tần số khác nhau

Chấm công
-
Giữ xung thời gian và giao thức
-
Dữ liệu giờ địa phương có độ chính xác cao
-
Chống nhiễu
Các tính năng của phần mềm
Chuỗi hoa cúc
-
Đồng bộ hóa nút cảm biến với nút cảm biến
-
Đồng bộ hóa bộ điều khiển với bộ điều khiển
-
Tự động hiệu chỉnh độ trễ
-
Mở rộng các kênh đồng bộ
Cảm biến nhiệt hạch
-
Hợp nhất GNSS và IMU kép
-
Thuật toán EKF tích hợp
-
Cho phép thuật toán tổng hợp cảm biến tùy chỉnh
Công cụ Python
-
Dòng lệnh thân thiện
-
Đáp ứng các yêu cầu cảm biến khác nhau
-
Hỗ trợ x86 và hệ thống dựa trên Arm
Lập bản đồ

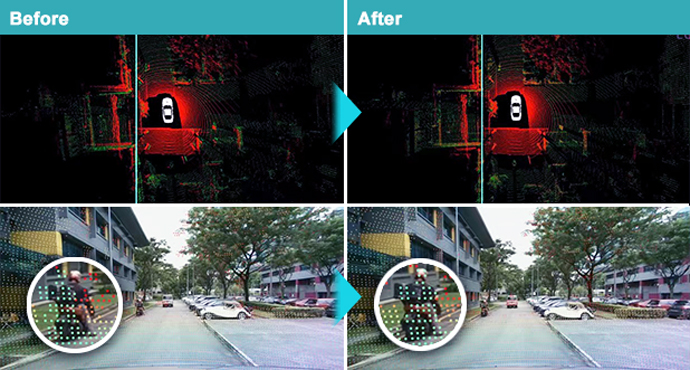
Công nghệ đồng bộ hóa thời gian Vecow – Bộ bản đồ di động là một giải pháp thân thiện với người dùng được thiết kế để cho phép các thiết bị đồng thời tự định vị và tạo bản đồ về môi trường xung quanh. Đồng bộ hóa thời gian đóng vai trò quan trọng trong việc tạo bản đồ chất lượng cao vì nó đảm bảo rằng tất cả dữ liệu cảm biến được căn chỉnh chính xác trong miền thời gian. Sự liên kết này rất cần thiết để liên kết chính xác các phép đo cảm biến với các mốc hoặc đặc điểm tương ứng trong môi trường, từ đó giảm lỗi xử lý dữ liệu. Đồng bộ hóa thời gian góp phần ước tính chuyển động chính xác và phát hiện đóng vòng lặp, mang lại kết quả ánh xạ chính xác, đáng tin cậy và chất lượng cao hơn thông qua SLAM. Bộ sản phẩm bao gồm bộ điều khiển Vecow VCM-1000F và phần mềm Kudan SLAM , giúp nó phù hợp với nhiều môi trường khác nhau.
Sự định cỡ

Giải pháp đồng bộ hóa thời gian Vecow – Hiệu chuẩn bên trong và bên ngoài của nhiều cảm biến (chẳng hạn như máy ảnh, lidars, radar, IMU) là một thuật toán quan trọng để đạt được hoạt động an toàn và đáng tin cậy của hệ thống tự động trong nhà hoặc ngoài trời. Các phương pháp hiệu chuẩn truyền thống tốn thời gian, chi phí và dễ xảy ra lỗi do thực hiện thủ công. Đối tác Curium của chúng tôi cung cấp giải pháp hiệu chuẩn đa cảm biến hoàn toàn tự động cho các trường hợp sử dụng ô tô và phi ô tô. Hiệu chuẩn tự động cho phép chu kỳ hiệu chuẩn nhanh hơn và thường xuyên hơn, với tính năng đồng bộ hóa thời gian giúp cải thiện sự kết hợp và độ ổn định của cảm biến theo thời gian. Curium Calibration Edge (C2E) bao gồm bộ điều khiển ECX-3200 của Vecow chạy Curium Calibration Suite (C2S) để hiệu chuẩn động liền mạch và không rắc rối khi đang di chuyển.
Cảm biến nhiệt hạch

Phản ứng tổng hợp đa cảm biến là một thuật toán phần mềm quan trọng trong các ứng dụng robot ngoài trời và xe tự hành. Độ chính xác của dữ liệu hợp nhất ảnh hưởng trực tiếp đến chất lượng điều hướng và khả năng an toàn của hệ thống. Để nâng cao hơn nữa khả năng tích hợp của bộ điều khiển, chúng tôi cộng tác với một đối tác phần mềm chuyên về phát triển phản ứng tổng hợp cảm biến và ngăn xếp phần mềm. Bằng cách kết hợp bộ điều khiển mạnh mẽ của chúng tôi với kiến thức chuyên môn về phần mềm tiên tiến, chúng tôi đảm bảo rằng khách hàng của mình sẽ nhận được khả năng nhận biết và tổng hợp cảm biến chất lượng cao.
Bản địa hóa

Để đạt được bản địa hóa, quy trình này bao gồm việc thu thập dữ liệu từ nhiều cảm biến và sử dụng các bản đồ đáng tin cậy, các cảm biến như LiDAR, GNSS, IMU, máy ảnh và dữ liệu đo đường bánh xe được sử dụng kết hợp . Phối hợp với đối tác phần mềm bản địa hóa, chúng tôi cung cấp các giải pháp bản địa hóa tiên tiến mang lại độ chính xác và độ chính xác cao.
dẫn đường

Khả năng của robot trong việc xác định vị trí của chính nó và lập kế hoạch đường đi tới vị trí mục tiêu liên quan đến nhiều công nghệ khác nhau như định vị trực quan, định vị dựa trên LiDAR, định vị dựa trên GNSS, phản ứng tổng hợp cảm biến, lập kế hoạch đường đi toàn cầu, lập kế hoạch đường đi cục bộ, điều hướng dựa trên điểm tham chiếu, dạy-lặp lại điều hướng và tránh chướng ngại vật. Vecow cung cấp nhiều loại bộ điều khiển đáp ứng nhu cầu đa dạng của khách hàng. Thông qua cách tiếp cận hợp tác với các đối tác phần mềm, chúng tôi không chỉ giải quyết những lo ngại về độ tin cậy của phần cứng mà còn giúp khách hàng đạt được hiệu suất tối ưu trong ứng dụng của họ.
Liên hệ tư vấn ngay: 0385 546 492
Email: An@jon-jul.com
Văn phòng đại diện: Số 4 Đường 14, Quốc Lộ 13, Khu Đô Thị Vạn Phúc , Phường Hiệp Bình Phước, Thành phố Thủ Đức, Thành phố Hồ Chí Minh, Việt Nam